AMBER Bipeds

Project Details:
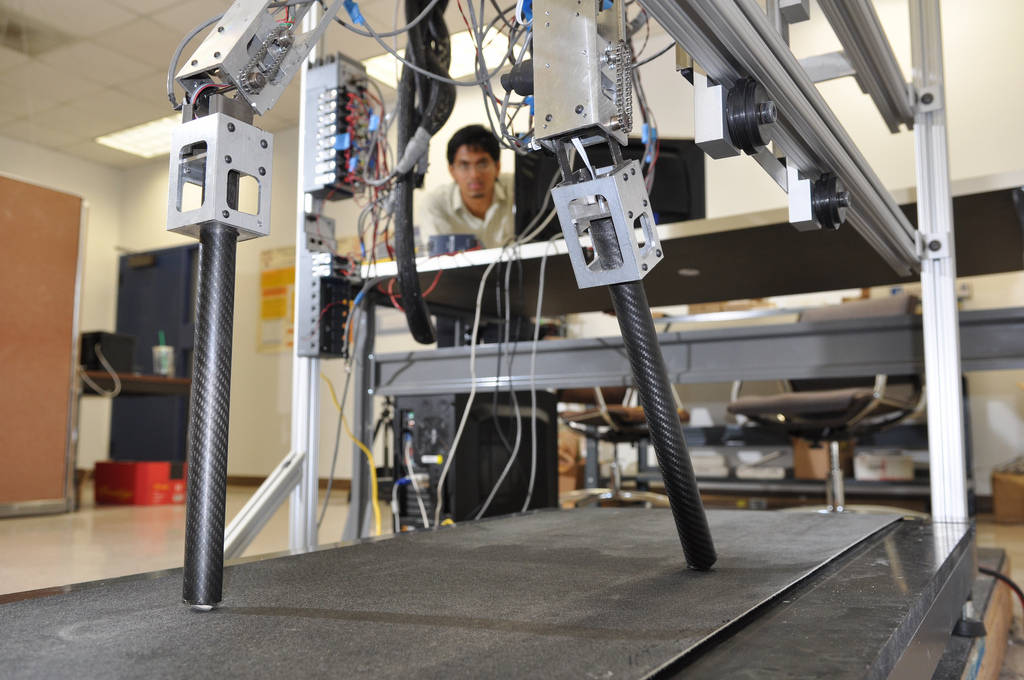
The A&M Bipedal Experimental Robots (AMBER) were designed to act as a testbed for the nonlinear control theory developed in AMBER Lab at Texas A&M. The first robot in the series, AMBER 1, was constructed to test the Human-Inspired Control framework which other researchers and I developed. I worked with other graduate students to design AMBER 1 and I did some of the machining for the prototype. Construction of these robots required selecting components and purchasing them from vendors. I ran experiments on this robot to validate theoretical contributions which I published in various sources. The next robot, AMBER 2, was designed to be a more powerful version of its predecessor and, unlike AMBER 1, had feet that could be used to achieve human-like foot behavior. In order to achieve better motor control, other researchers and I implemented field-oriented control in LabVIEW using an FPGA.
Implementation of formal control methods on cyber-physical systems is rarely straightforward. Achieving walking on these robots required extensive simulation and numerical optimization of walking gaits. I chose to construct the simulations with a collection of programming languages: Lagrangian modeling was done in Mathematica and exported to MATLAB, converting using Perl. Eventually, I exported the modeling expressions to C++ which I cross-compiled with MATLAB MEX to allow these C++ functions to be called from MATLAB—this greatly sped up simulations. The hybrid model itself I programmed in MATLAB which allowed me to take advantage of MATLAB's numerical programming packages. I formulated and ran optimizations in order to achieve walking gaits.
Some of the tasks involved:
- Code development (MATLAB, Mathematica, C++, Perl)
- Collaboration and source code management (Git, rsync)
- Interfacing with Hall effect and position sensors (C/C++, LabView)
- Debugging electronics and systems
- Analyzing API and hardware interface specifications
- Formulation of hybrid simulation models (MATLAB, Mathematica)
- Implementing field-oriented control (FPGA)
- Embedded systems programming (VxWorks)
- Design of non-linear hybrid controllers (control theory)
- Presenting results at international conferences
- Publishing research papers (LaTeX)
additional information:
- Categories : Robotics, Programming
- Location : Texas A&M University, College Station, TX
- Position : NSF Graduate Research Fellow
- Supervisor : Prof. Aaron D. Ames
- Date : 2010 – 2014
- URL : www.bipedalrobotics.com
