NAO Robot


Project Details:
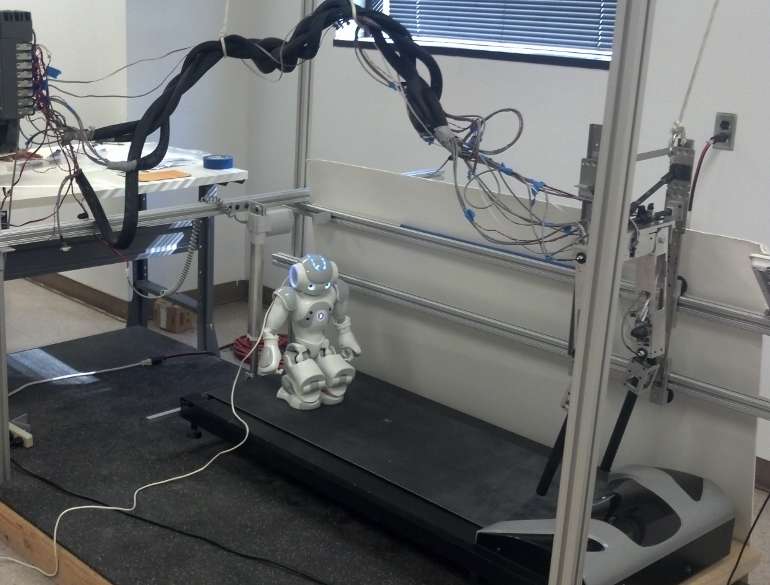
My Ph.D. program focused on control of bipedal robots and design of humanlike gaits. Based on the human-inspired control paradigm, which I helped develop, and functional Routhian reduction, which I worked on as a Master's student, I found ways to make three-dimensional robots walk similar to humans. After testing these ideas in simulation, I needed a physical platform to validate the framework. The only three-dimensional robot I had access to at the time was the NAO robot. It was far from ideal due to the non-humanlike nature of its proportions—the feet are the same length as the calves!—but I was able to obtain three-dimensional walking nonetheless which was remarkably humanlike, especially given the platform.
The experimental results from this robot were useful in motivating the controllers I had developed and appeared as such in a number of my publications. Some of the challenge of implementing advanced controllers on this platform stemmed from its restrictive computational capacity. Implementing real-time control thus required careful algorithm design which necessitated an understanding of the hardware architecture of the system. The robot comes with a graphical interface for creating behaviors, but my implementations disregarded this software in favor of directly interacting with the sensors and actuators through a hardware interface layer. I wrote the code in C++ to do this and the result was a pseudo–real-time (inasmuch as a non–real-time operating system can operate in real-time) implementation. Some of these challenges have been discussed in my publications and are discussed in submissions currently under review.
Some of the tasks involved:
- Code development (C++)
- Interfacing with IMUs, force sensors, position sensors (C/C++, sensor fusion)
- Source code management (Git)
- Experimentation
- Analyzing API and hardware interface specifications
- Formulation of hybrid simulation model (MATLAB, Mathematica)
- Design of non-linear hybrid controllers (control theory)
- Presenting results at international conferences
- Publishing research papers (LaTeX)
additional information:
- Categories : Robotics, Programming
- Location : Texas A&M University, College Station, TX
- Supervisor : Prof. Aaron D. Ames
- Date : 2010 – 2012
- URL : www.bipedalrobotics.com
