Human-Inspired Control
Project Details:
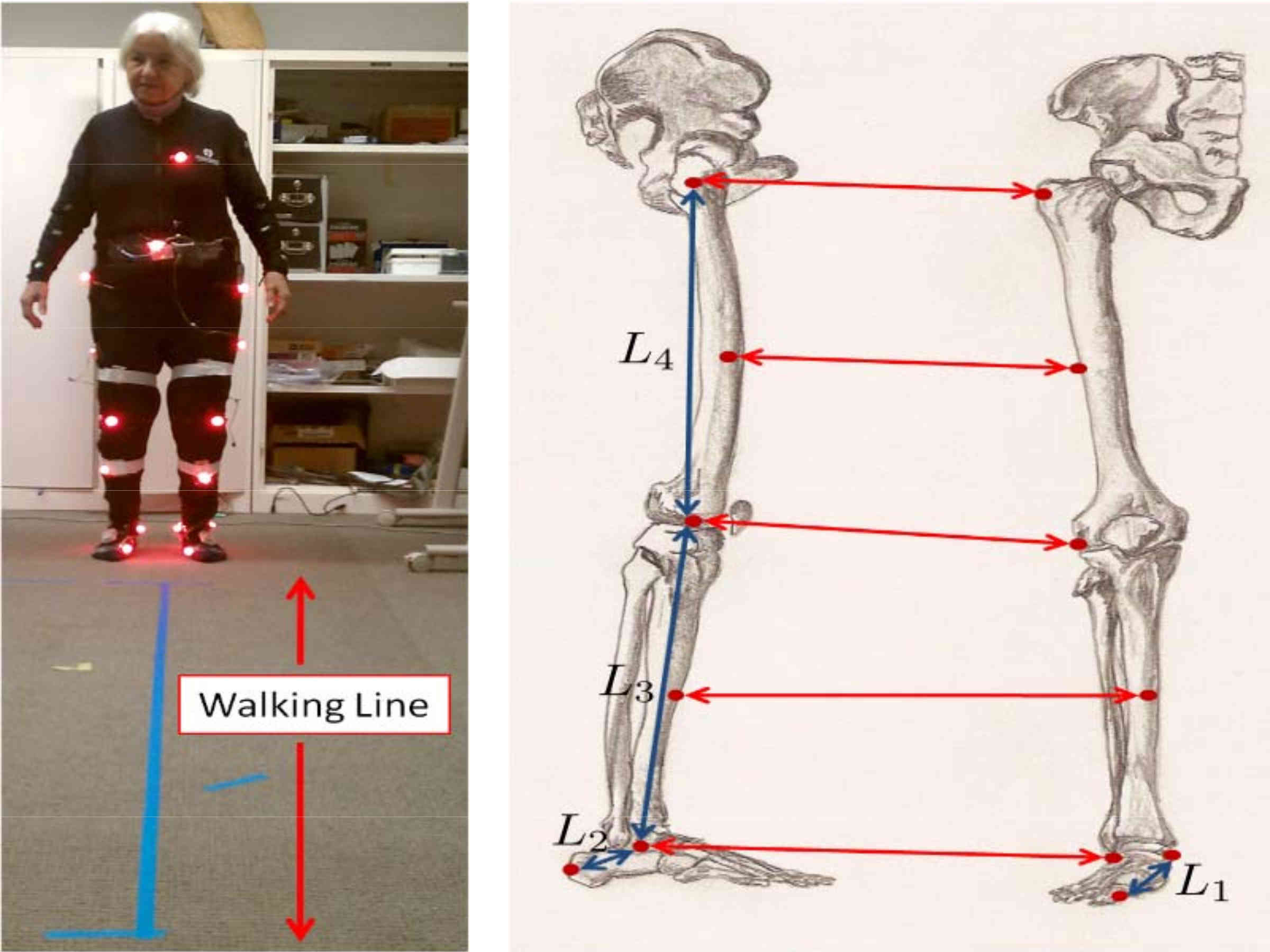
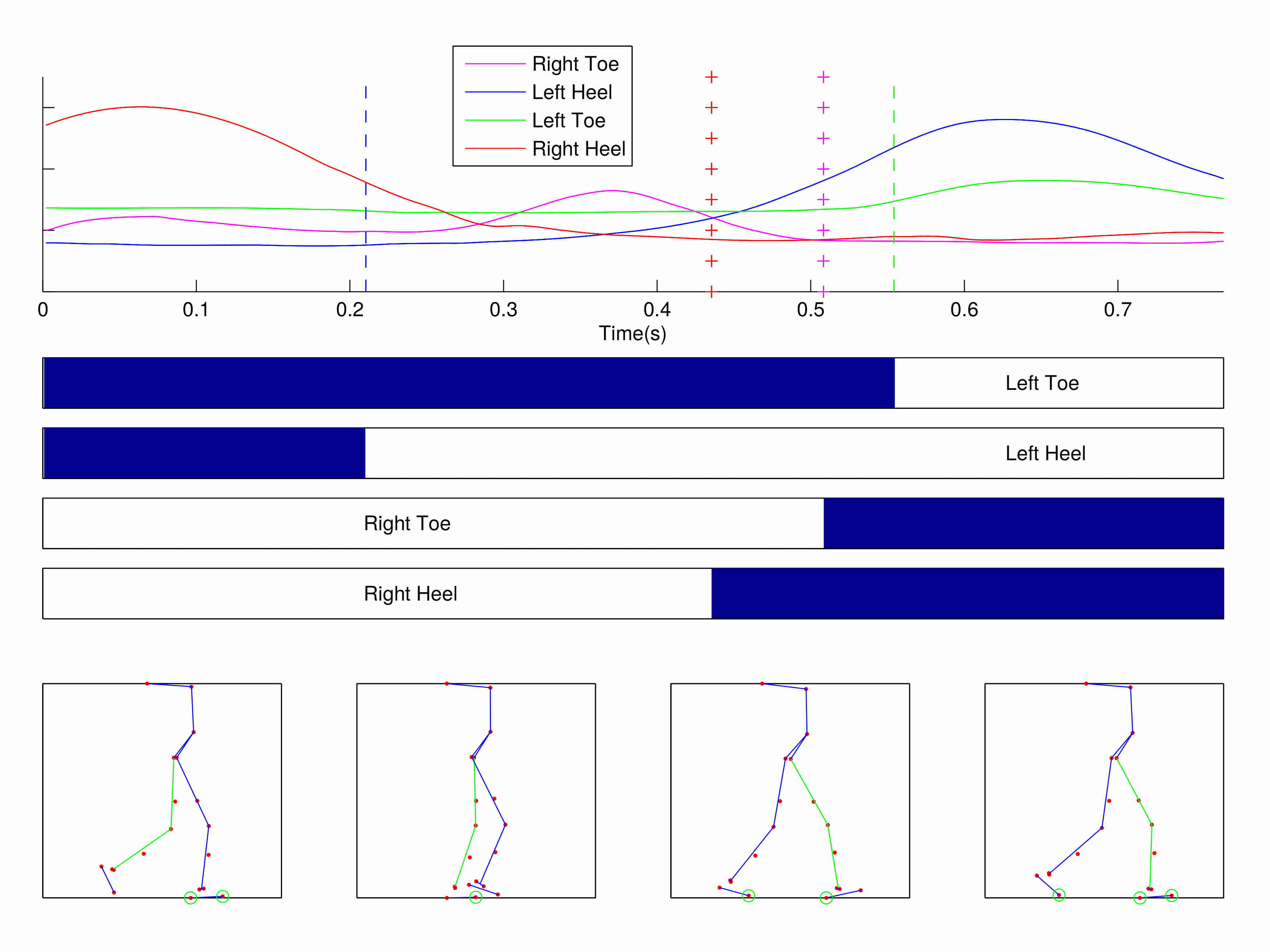
During my doctoral studies, I spent some time studying bipedal locomtion in an attempt to realize human-like walking on humanoid robots. Part of this research involved a collaboration with Prof. Ruzena Bajcsy at the University of California at Berkeley. Using the PhaseSpace Motion Capture system, we recorded the kinematics of human walking with high fidelity sensors in a three-dimensional test area. Other researchers and I then analyzed these data for patterns and the results were used obtain human-like walking on a robot with complex in foot behavior simulation.
To date, the human-inspired control methods have been used to realize walking on various bipedal robots including AMBER 1, AMBER 2, and NAO. Some of the hardware for the AMBER series of robots was provided by National Instruments and the project has involved low-level work to implement field-oriented control on the motors using FPGA/DSP technology along with other common considerations such as interface design and embedded systems programming. Proper control of these robots relies heavily on sensor fusion as the controllers are state-based. These robots have proved instrumental as test beds and have been used to validate the claims of human-inspired control.
Some of the tasks involved:
- Experimental measurement of human kinematics data
- Analysis of human motion data (statistical methods)
- Optimization of walking gaits (numerical methods)
- Formulation of hybrid simulation model (MATLAB, Mathematica, C++)
- Design of non-linear hybrid controllers (control theory)
- Presenting results at international conferences
- Publishing research papers (LaTeX)
additional information:
- Categories : Experimentation, Robotics, Programming
- Location : Texas A&M University, College Station, TX
- Position : NSF Graduate Research Fellow
- Supervisor : Prof. Aaron D. Ames
- Date : 06.2010 – 06.2013
- URL : www.bipedalrobotics.com
